


1. 서 론
국제연합(UN) 산하 국제해사기구(IMO)에서는 선박평형수를 세계 해양을 위협하는 심각한 4대 위협 중 하나로 규정하고, 해양 외래종 유입으로 인한 생태계 및 경제적 피해를 방지하기 위해 2004년 ‘선박평형수 및 침전물의 배출규제와 관리에 관한 협약’을 채택하여 선박평형수 처리 장비를 설치하고, 배출기준에 부합하도록 요구하고 있다(IMO, 2004). 이에 신규 제작되는 선박(new building ship)의 경우 2017년, 기존에 운항되고 있는 선박(used ship)의 경우 2019년부터 선박평형수 처리(관리) 장비의 설치를 의무화하고 있다. 선박평형수 처리 장비의 설치가 의무화됨에 따라 각 장치의 정상 작동 유무와 배출되는 처리수를 검증하는 작업이 필요해 졌다. 처리수를 검증하기 위해 현재 이용되는 방법은 주로 해양 생물 분야의 지식을 겸비한 인력에 의한 정밀 분석이 주를 이루고 있으며, 이러한 작업은 많은 시간과 노력이 필요하다. 또한 향후 항만국 통제(Port State Control, PSC)에 의한 선박평형수 배출 수에 대한 검사가 증가됨을 예상했을 때 선박평형수 처리 장비의 검증에 필요한 지표 분석방법의 개발은 항만의 원활한 운용 및 선박의 신속한 입출항을 위해서 필요한 부분이다. ≥50 μm 생물(주로 동물플랑크톤)에 대한 생사를 판별함에 neutral red [1,2], aniline blue [3,4] 등 염색 시약을 이용한 방법들이 일부 적용되고 있으나, 기본적으로 몸체, 편모, 또는 부속 지의 운동성에 기반을 두어 판별하는 방법이 주로 이용되고 있다[5]. 그러나 이러한 방법들은 현장에서 항만 종사자 또는 선원에 의해 즉각적으로 적용하기는 어렵다.
본 연구에서는 지표 분석 방법 개발의 일환으로 비전 시스템(vision system)을 통해 움직이는 입자(>50 μm)를 검출하고, 해당 시스템에 확장칼만필터(extended kalman filter)를 적용하여 입자의 이동 경로를 추적하였다. 칼만필터(kalman filter)는 나사(NASA)의 아폴로 프로젝트의 항법시스템에 적용하기 위해 개발된 것으로 카메라 추적(camera tracking), 시각 시스템(vision system), 표적추적(target tracking), 로봇공학(robotics), 내비게이션(navigation) 등 다양한 분야에 적용되고 있는 대표적인 상태 추정 알고리즘이다. 선형적 움직임을 가지는 대상을 재귀적 방법으로 예측하며, 측정값에 포함된 불확실성(noise)을 제거하여 원하는 신호나 정보를 골라내는 특징을 가지고 있다. 그러나 움직임이 불규칙하고, 급격하게 변화는 대상을 추적하기 힘든 부분이 있다[6]. 따라서 본 연구에서는 칼만필터의 단점을 보완하여 비선형적인 움직임을 보이는 입자의 추적이 용이한 확장칼만필터를 시스템 구축에 고려하였다. 수중에서 살아있는 동물플랑크톤은 변칙적이고, 비선형적인 움직임을 보이며, 반대로 부유물은 이동 범위가 좁고, 상대적으로 선형적인 움직임을 보인다. 이러한 점에 착안하여 확장칼만필터로 예측한 이동 경로와 실제 이동 경로를 비교하여 이동 편차가 큰 객체를 살아있는 생물로 검출하고자 하였다[7]. 이러한 알고리즘의 특성을 응용하여 생사판별의 한 방법으로 활용 가능성을 검토하여 지표 분석 방법의 개발에 반영하는데 있으며, 차후 선박평형수 관련 승인 기관(IL)과 교차 확인을 통해 지표 분석 방법으로써 유용성, 비용적인 문제, 처리 시간 등 여러 변수들을 종합적으로 고려하고자 한다[8].
2. 재료 및 방법
2.1. 동물플랑크톤 채집
이미지 처리에 이용할 동물플랑크톤의 채집은 2017년 10월~2018년 9월에 걸쳐 거제 장목(34° 59' N, 128° 40' E)과 부산 신항(35° 4' N, 128° 50' E), 마산 내만(35° 12' N, 128° 35' E)에서 실시하였다(Table 1). 체폭이 50 μm 보다 큰 생물을 채집하기 위해 망목 32 μm 원추형 네트(망구 30 cm, 길이 60 cm)를 이용하여 저층에서 표층까지 수직 예인하였다. 이동 중에 동물플랑크톤의 손실을 최소화하기 위해 채집된 지역의 수온을 고려하여 온도의 변화를 최소화하였으며, 이동 중에 충격을 최소화하기 위해 채집 상자 내부에 공기 완충제를 구비하였다. 채집된 동물플랑크톤은 실체현미경(carl zeiss, stemi 2000-c) 하에서 활동성이 강한 개체를 중심으로 1 mL 스포이드를 이용하여 페트리디쉬에 분배(sorting)한 후 각 분류군의 이동성향을 추적하기 위한 투명 셀에 투여하였다.
2.2. 비전 시스템(Vision System)
채취된 샘플을 이송할 수 있는 관찰용 투명 셀(cell)을 적용하였고, 경계선이 분명한 이미지를 확보하기 위해 백색 조명을 조사하였다. 또한 외부 산란광을 차단하기 위해 기구 주변부에 덮개(cover)를 설치하였으며, 샘플의 움직임을 측정하고, 잔상을 최소화하기 위해 현미경용 고속카메라(60fps, 2 megapixel)로 구성된 시스템을 사용하여 영상을 확보하였다(Fig. 1). 영상의 실시간 분석을 위해 고성능 PC (cpu: i7-6850k, ram: ddr4 64g, ssd: 850 pro 2tb)를 사용하였으며, 영상에서 객체 검출 및 추적을 위한 컴퓨터 비전 라이브러리 opencv (open source computer vision), 추적한 객체의 생사판별을 위해 확장 칼만 필터(extended kalman filter)를 사용하였다. 측정 cell은 유입구와 유출 구를 구비하였으며 valve와 pump의 작동으로 샘플수가 자동으로 유입되어 영상분석을 진행하고, 분석이 끝난 후 자동으로 샘플수가 배출되어 샘플의 측정 시간은 동일하게 유지되도록 했다.
2.3. 객체 검출 및 경로 확인
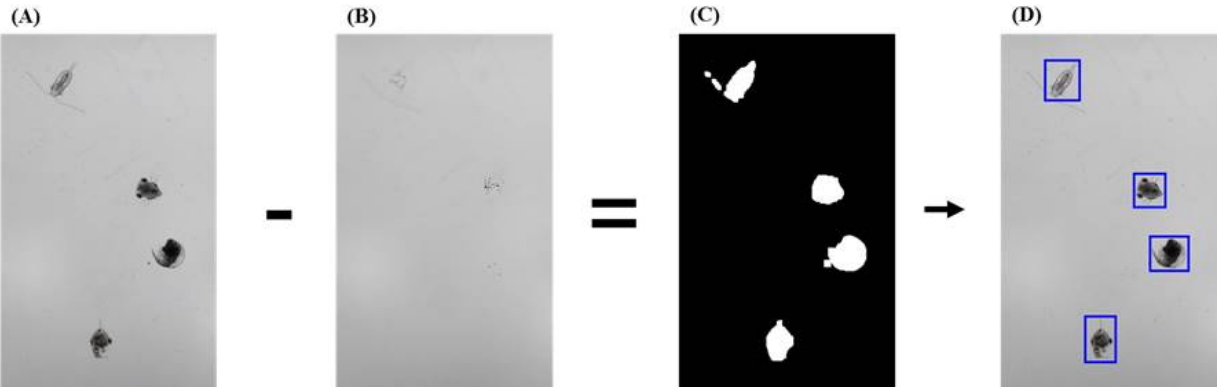
움직이는 객체에 대한 검출을 위해 opencv (open source computer vision) 라이브러리가 제공하는 배경제거(background subtraction) 기법 및 차영상(difference image) 기법을 이용하였다. opencv는 배경제거 기법으로 다양한 라이브러리를 제공하는데, 본 연구에서는 비전 시스템의 특성상 셀(sample cuvette) 이라는 고정된 배경에 수십 μm의 작은 픽셀 집합을 관찰해야 하는 특성을 고려하여 픽셀의 변화가 적을 때 높은 효율을 보이는 knn (k-nearest neighbours) 배경제거 라이브러리를 사용하였다. 객체의 검출 원리는 현재 프레임(current frame)에 knn 배경제거 기법으로 추출된 프레임(knn-background frame)을 차 영상하여 움직임이 검출된 프레임(result frame) 영역을 산출해 내고, 산출된 프레임을 바탕으로 객체가 검출된 프레임(detect using result)을 확보하였다(Fig. 2).
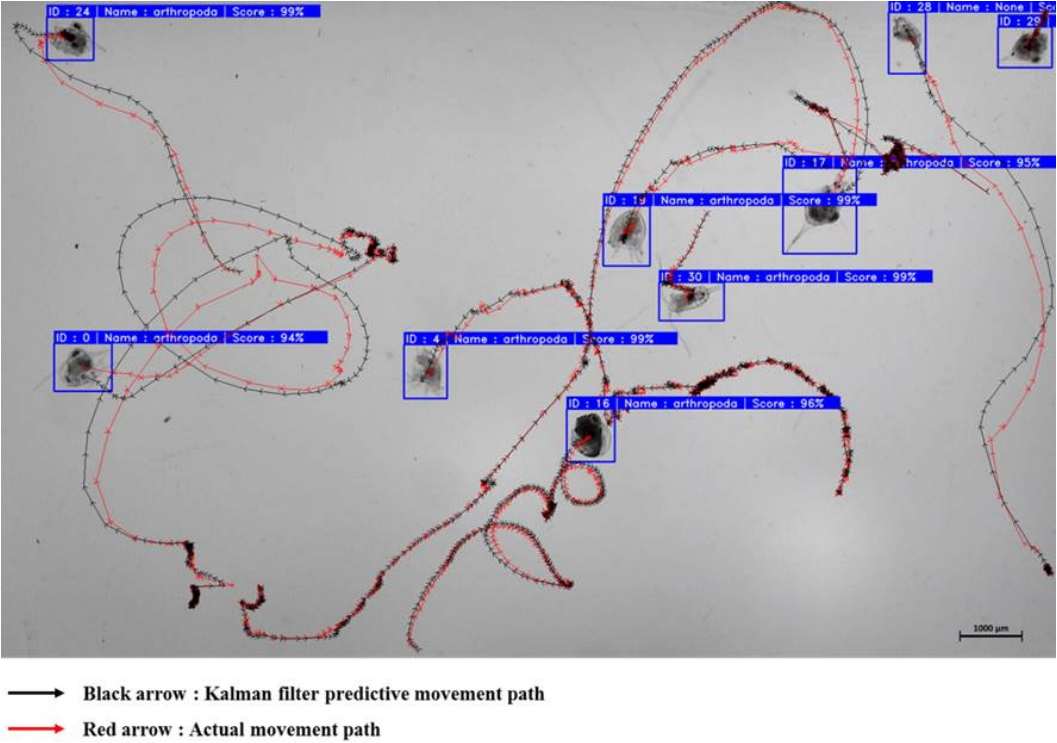
또한 선제적으로 적용된 차영상에 의한 객체 검출 원리를 이용하여 입력 프레임(input frame)에 대한 검출 프레임(detect frame)을 확보하고, 확보된 프레임을 통해 백색 픽셀 집합의 윤곽 프레임(contour frame)을 도출할 수 있다. 윤곽 프레임 과정을 거친 객체는 연산을 통해 무게중심(get center)과 검출된 객체의 좌표를 결정(get position)할 수 있다(Fig. 3). 이러한 처리 과정을 연속된 모든 프레임에 적용하게 되면 실측 이동 경로(actual movement path)를 산출할 수 있다. 산출된 실측 이동 경로는 확장칼만필터의 입력 데이터로 사용하여 예측 이동 경로를 계산할 수 있고, 실측 이동 경로와 비교하여 경로의 차이를 분석하고, 기록하였다(Fig. 4).
2.4. 생사 판별
본 연구에서는 검출된 객체(동물플랑크톤 또는 입자)의 실제 이동 경로와 칼만필터를 적용해 예측된 이동 경로간의 차이를 오차로 간주하고, 이를 수치화 하여 생사판별에 이용하였다. 이러한 오차의 정도를 수치화하기 위해서는 오차의 현상을 가장 잘 표현하는 데이터 구간을 지정할 필요가 있었으며, 실제 이동 경로와 예측된 이동 경로 간에 표준편차 값이 가장 크게 벌어지는 이동경로 구간에 대한 표준편차를 피 기준 값으로 선정하였다. 이와 같은 방법으로 총 171개의 입자를 검출하였으며, 각 입자 별 수집된 샘플 데이터를 기반으로 예측오차에 대한 표준편차를 계산하여 생사판별 실시하였다.
3. 결과 및 고찰
3.1. 생사 판별을 위한 기준 값 선정
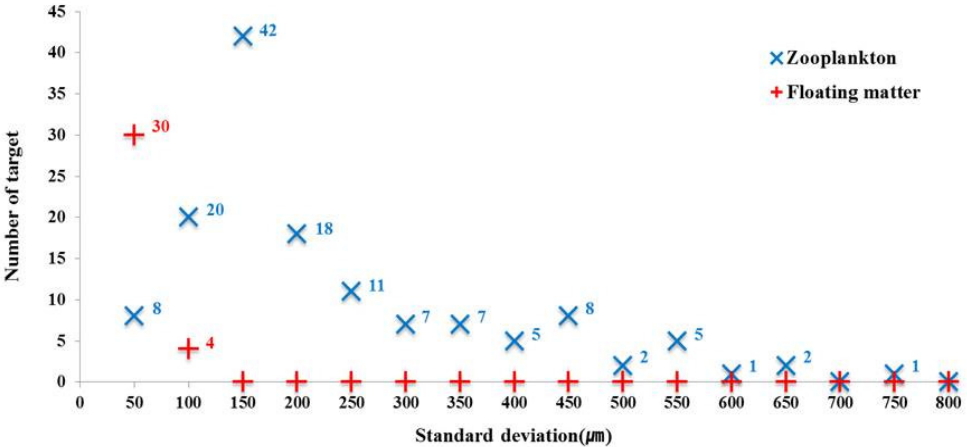
비전 시스템을 통해 검출된 객체에 대한 생사판별하기 위해서 먼저 영상판독을 통한 실제 생사여부의 확인이 이루어져야 한다. 이에 검출된 171개의 객체에 대해 육안 판독을 실시하였으며, 판독된 데이터를 기반으로 부유물 및 각 개체에 대한 표준편차 분포도(Fig. 5)를 산출하였다. 산출된 분포도를 통해 동물플랑크톤 개체의 경우 이동 편차가 100 ~ 200 μm 사이에 집중되는 양상을 보였고, 700 μm 이상의 이동 편차를 보이는 개체도 확인되어 상대적으로 이동 편차가 크고 범위가 넓은 양상을 보였다. 반면에 부유물의 경우 이동편차가 100 μm 이하에 집중되는 것을 확인할 수 있었으며, 150 μm 이상에서는 표준편차 값이 0에 수렴하는 것으로 나타나 예측된 이동 경로와 실제 측정된 이동 경로 간에 차이가 없는 것을 확인할 수 있었다. 본 연구에서는 부유물의 분포가 가장 높은 50 μm 구간을 생사판별의 기준 값으로 선정하였으며, 이를 통해 수중에 부유하는 입자 간에 일반 부유물과 동물플랑크톤을 구분할 수 있을 것으로 예상하였다.
171개의 객체에 생사판별 기준 값 50 μm를 각각 적용한 결과 동물플랑크톤은 133개체, 부유물은 38개 검출되었다. 각 항목 별 적중률은 동물플랑크톤이 133개체 중 129개체를 적중시켜 약 97%의 적중률을 보였으며, 부유물은 총 38개 중 30개를 적중시켜 약 79%의 적중률을 보였다. 전체 적으로는 총 171개 객체 중에 159개의 입자를 적중시켜 육안 분석 대비 약 93%의 적중률을 보였다(Table 2).
3.2. 수중 입자에 대한 칼만 필터 적용
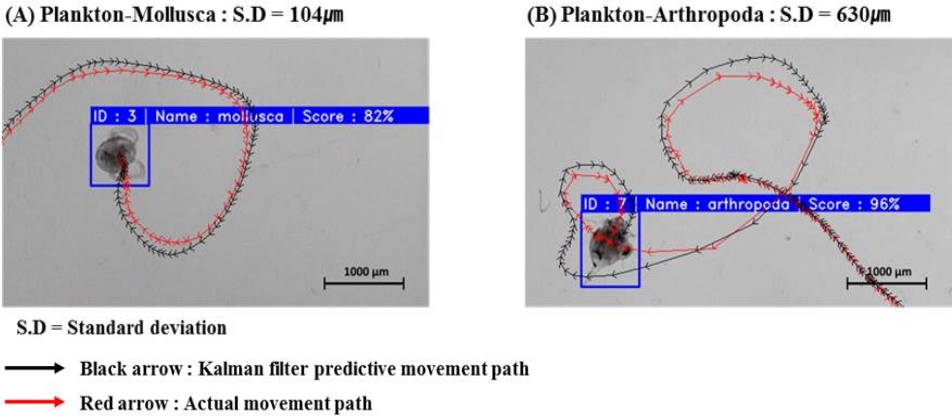
비전 시스템에 의해 검출된 영상을 대상으로 수중 입자에 확장칼만필터를 적용했을 때 움직임이 활발하고, 비선형적인 양상을 보이는 동물플랑크톤의 경우 실제 측정된 경로와 예측된 경로 간에 오차가 크게 나타났다. 반대로 움직임이 느리거나, 일정한 위치를 맴도는 개체의 경우 실체 측정된 경로와 예측된 경로 간에 오차가 상대적으로 작은 것으로 확인되었다. 수중에서 각 분류군의 활동 양상에 따라 이동 편차에 차이가 나는 것을 확인할 수 있었다. Fig. 5는 연체동물과 절지동물을 대상으로 이동 경로를 추적하고, 예측한 것으로 절지동물의 이동 편차 값이 630 μm로 104 μm를 보인 연체동물에 비해 이동성이 활발함을 알 수 있었다. 두 분류군의 각 이동 경로에 대한 편차는 기준으로 제시된 50 μm를 초과하는 것으로 나타나 비전 시스템 상에서 동물플랑크톤으로 분류할 수 있다(Fig. 6).
3.3. 확장칼만필터 적용 시 문제점
수중 입자에 대해 칼만 필터를 적용하여 이동 경로를 추적하고 판별하는 과정에서 일부 샘플의 경우 검출과정에서 문제점이 발견되었다. 다수의 동물플랑크톤이 서로 겹치면서 시스템적으로 다른 부유물과 구분하지 못하거나, 순간적으로 매우 빠른 움직임을 보일 경우 이동 경로의 중심좌표가 인접 개체에 영향을 받는 것으로 나타났다(Fig. 7(A)). 또한 수중 부유물과 같이 상대적으로 선형적인 움직임이 포착되고, 이동 경로가 크지 않은 입자의 경우에도 진동이나, 대형 동물플랑크톤의 이동 등에 영향을 받아 이동 경로가 확대되고, 비선형적인 움직임을 보일 수 있는 것으로 확인되었다(Fig. 7(B)) 이러한 현상들은 생물과 무생물을 구분하는 과정에서 시스템 오작동의 원인으로 작용할 수 있는 까닭에 자료 구축 과정에서 제외하였다.
부유물의 경우 동물플랑크톤 대비 이동이 제한적이고, 이동 경로에 대한 편차가 크지 않다. 그러나 이러한 특징들은 일부 동물플랑크톤 개체에서도 확인되는 사항으로 시스템적으로 잘못된 결과 값이 도출될 수 있는 것으로 나타났다. 특히 상대적으로 이동 범위가 좁고 일정 구역에서 몸체의 수축과 이완을 반복하는 일부 자포동물의 경우 이동 편차가 31 μm로 측정되었으며, 움직임이 느리고, 몸체의 변형이 자유로운 환형동물의 일부는 실제 이동경로와 예측 경로 간에 이동 편차가 23 μm로 생사판별 기준으로 설정한 50 μm에 미치지 못하는 것으로 확인되었다(Fig. 8). 또한 본 연구에 적용된 비전 시스템은 관찰 cell 내의 한정된 영역을 기준으로 검출하기 때문에 몸체가 상대적으로 크거나 촉수 등 몸체의 일부만 움직일 경우 개체의 전체를 검출하지 못하거나[9], 하나의 개체를 여러 영역으로 중복하여 검출하는 등[10] 검증 대상을 과소 또는 과대평가할 위험을 내포하고 있다. 수중에 존재하는 동물플랑크톤은 분류군에 따라 매우 다양한 이동 특성을 가지고 있고, 주변 환경에 따라 입자들의 이동 특성도 불규칙적인 양상을 보일 수 있다. 그러나 본 연구에 적용된 자료들은 실 환경에 비해 매우 한정적이고, 다양한 변수들을 고려하지 않은 면이 있다. 따라서 차후 지표 분석 방법의 일환으로 확장칼만필터를 적용하기 위해서는 수중 입자에 대한 고유한 검출 특성 확인과 검출 특성에 대한 지속적인 자료 확보와 추가적으로 실제 환경에서 각 입자들의 이동 특성에 대응하고, 연산 시간을 단축할 수 있는 최적의 알고리즘 개발이 필요한 부분이다.
4. 결 론
본 연구에서는 수중 입자의 실제 이동 경로와 확장칼만필터를 적용하여 도출된 예측경로를 비교하여 이동 편차를 확인하였다. 이를 바탕으로 생물과 무생물(사체, 일반 부유물)을 구분하고, 생사판별에 응용하려 하였다. 동물플랑크톤의 경우 예측경로와 실측 경로 간에 이동 편차가 크게 나타났으며, 이러한 편차는 생물의 이동 특성에 따라 다양한 양상을 보일 것으로 예상된다. 반대로 부유물의 경우는 상대적으로 정적인 움직임을 보이고, 이동 편차가 적은 것으로 확인되었다. 비록 검출 과정에서 이용한 입자의 개수가 많지 않으나, 확장칼만필터를 적용한 시스템의 적중률은 93%로 확인되어 본 연구의 결과 값을 바탕으로 살아있는 생물과 일반 부유물을 구분할 수 있는 근거 자료로 활용할 수 있을 것으로 본다. 그러나 본 연구의 결과는 일부의 동물플랑크톤 분류군에 한정한 결과로 수중에 존재하는 모든 입자(생물과 무생물)의 이동경향을 대표하지는 않으며, 확장 칼만 필터의 동물플랑크톤에 대한 높은 역학 모델링으로[7] 인해 다양한 입자간의 이동 편차를 확인하고, 확인된 여러 변수들을 제어 하려는 노력이 필요할 것으로 본다.